





|
詳細情報 |
|||
| 名前: | 使用されたABBのロボット腕6の軸線IRB1410 6のロボット アーク溶接 | ブランド: | ABB |
|---|---|---|---|
| モデル: | IRB1410 | 生産年: | 2000-2015年 |
| 保証: | 3か月 | 範囲: | 1.44m |
| ペイロード: | 5kg | Reapetability: | 0.04 mm |
| 軸線: | 6 | ||
| ハイライト: | ABBは溶接ロボット6の軸線を使用した,使用されたABBのロボット腕IRB1610,使用された溶接ロボット6の軸線IRB1410 |
||
製品の説明
産業アーク溶接のロボット腕IRB1410 6の軸線はOTCのwelbee p400の溶接のsourseを顕著な性能に与え、
製品イメージ

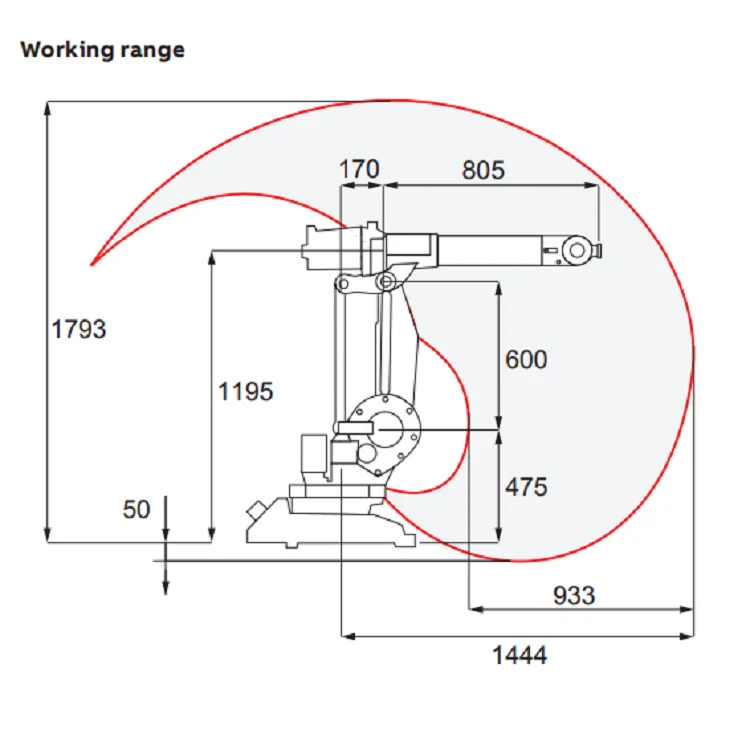
| ロボット版 | 範囲の 第5軸線(m) |
処理 容量(kg) |
補足の負荷、 軸線3 (kg) |
補足の負荷、 軸線1 (kg) |
| IRB 1410 | 1.44 | 5 | 18 | 19 |
| 斧の数 | 6 | |||
| 土台 | 取付けられる床- | |||
| コントローラー | IRC5単一のキャビネット、IRC5コンパクト | |||
| 統合される 信号の供給 |
上椀の12の信号 | |||
| 統合される 空輸補給 |
最高。上椀の8棒 | |||
rformance (ISO 9283に従って)
| ロボット版 | 位置の反復性RP (mm) | 最高。TCPの速度(m/s) | 軸線の連続的な回転 |
| IRB 1410 | 0.02 | 2.10 | 6 |
製品の説明
IRB 1410
工業用ロボット
IRB 1410は生産性を後押しする速く、信頼できる仕事周期を与える。ロボットはアーク溶接の塗布で証明され、顕著な性能および価値を提供し、短い元金回収の時間を保障する。
ロボットに上椀の適用装置のための独特な18kg付加的な負荷が付いている手首で5kgの処理容量がある。および道の正確さ優秀な管理水準優秀な作業質を提供するため。
プロセス速度および位置を調節する機能は棄却物がほとんどない最適製造の正確さを達成するために意味する。
IRB 1410は堅く、強い構造のために知られている。これは低雑音のレベル、定期整備と長い耐用年数間の長い間隔に翻訳する。ロボットに大きい仕事域および長い範囲がある。困難な、限られた位置のコンパクト デザイン、非常に細い手首および高性能操作。
プロセス速度および位置を調節する機能は棄却物がほとんどない最適製造の正確さを達成するために意味する。
IRB 1410は堅く、強い構造のために知られている。これは低雑音のレベル、定期整備と長い耐用年数間の長い間隔に翻訳する。ロボットに大きい仕事域および長い範囲がある。困難な、限られた位置のコンパクト デザイン、非常に細い手首および高性能操作。
アーク溶接のために合わせられる
IRB 1410は腕のプロセス用機器の最大限に活用されたアセンブリのためのワイヤー供給のケーブルで通信し、取り付け穴を統合した。使いやすいアーク溶接機能はIRC5ロボット コントローラーに標準としてされる特許を取られたプログラミングおよび操作インターフェイス単位- FlexPendantによって使用できるように含まれている。
大域サービスおよびサポート
worry-free操作のために、ABBはまた監視およびサポートのための装置への遠隔アクセスを与えるRemoteServiceを提供する。さらに、ABBの顧客は会社のサービス組織を利用できる;35年間以上のアーク溶接のセクターの経験によって、ABBは53ヶ国の100つの位置上のサービス支援を提供する。
IRB 1410は腕のプロセス用機器の最大限に活用されたアセンブリのためのワイヤー供給のケーブルで通信し、取り付け穴を統合した。使いやすいアーク溶接機能はIRC5ロボット コントローラーに標準としてされる特許を取られたプログラミングおよび操作インターフェイス単位- FlexPendantによって使用できるように含まれている。
大域サービスおよびサポート
worry-free操作のために、ABBはまた監視およびサポートのための装置への遠隔アクセスを与えるRemoteServiceを提供する。さらに、ABBの顧客は会社のサービス組織を利用できる;35年間以上のアーク溶接のセクターの経験によって、ABBは53ヶ国の100つの位置上のサービス支援を提供する。

この製品の詳細を知りたい